Übersicht
Der Anschluss (X9) für Encoder-Emulation (EEO) kann als Aus- oder Eingang verwendet werden. Als Ausgang dient dieser Anschluss zur Positionsrückführung zu einer analogen Steuerung und zur Konfiguration des Servoverstärkers als Master in einem Master/Slave-System. Sie können den Anschluss X9 auch als Eingang zur Regelung des Servoverstärkers durch einen A/B-, Impuls- und Richtungs- oder CW/CCW-Befehl verwenden. Typische Anwendungsbereiche für diesen Eingang sind der Einsatz des Servoverstärkers mit einer Schrittsteuerung und die Konfiguration des Servoverstärkers in einem Master/Slave-System.
Verwendung der Encoder-Emulation
Sie können Anschluss X9 vom Bildschirm Encoder-Emulation aus konfigurieren, indem Sie die Anschlussfunktion, die Auflösung und (sofern zutreffend) die Eingangsposition festlegen. Der Bildschirm Elektronisches Getriebe ermöglicht auch die Einstellung der Funktion von Anschluss X9.
Funktionseinstellungen
Die Zuweisung der Funktionseinstellungen für Anschluss X9 erfolgt über den Parameter DRV.EMUEMODE .
Emulations-Modus
0-Eingang (Kein EEO-Ausgang). Im Emulationsmodus ist der EEO-Anschluss (X9) als Eingang konfiguriert. Dies ist die empfohlene Einstellung und sollte in Verbindung mit FB2.MODE verwendet werden, um den von der sekundären Rückführeinheit akzeptierten Eingangstyp zu wählen. Siehe Rückführung 2 (FB2 Parameters ) für Definitionen des EEO-Anschlusses (X9). Beachten Sie, dass dieser Modus sich verhält wie bei Firmware-Versionen vor M_01-03-00-000.
In früheren Firmware-Versionen gibt dieser Modus an, dass der EEO-Anschluss nicht funktionsfähig ist.
Ausgangsmodi 1, 2, 6, 7, 8 und 9
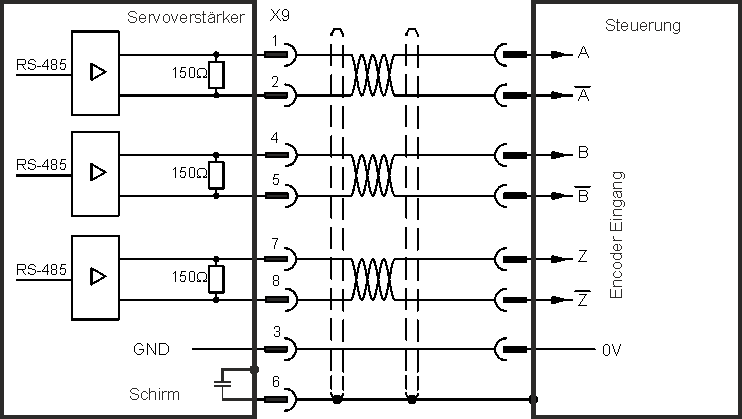
Der Servoverstärker erzeugt Ausgangsimpulse auf Basis der Motorposition. Am SubD Stecker X9 werden 3 Signale ausgegeben: A, B und Index, mit 90° Phasenverschiebung (das heißt quadratisch), mit einem Nullimpuls.
Wenn Sie den AKD als Master einsetzen, verwenden die Slave-Verstärker die Encoder-Ausgangssignale des Masters als Befehlseingang und befolgen diese Befehle (Geschwindigkeit und Richtung). Die Verstärker arbeiten mit einer internen Versorgungsspannung.
Modus 1- A quad B mit einem Indeximpuls pro Umdrehung
Ausgangsmodus 1 - A quad B mit Indeximpuls pro Umdrehung – Anschlussbild
Dieser Ausgangsmodus simuliert ein Encoder-Signal von Anschluss X9 an einen anderen AKD oder eine externe Steuerung. Die EEO-Auflösung (DRV.EMUERES ) legt fest, wie viele Schritte für eine Umdrehung der primären Rückführung ausgegeben werden.
Der Index-Offset (DRV.EMUEZOFFSET ) bestimmt den Punkt während der Umdrehung der primären Rückführung, an dem der Indeximpuls (X9, Pin 7&8) über Anschluss X9 ausgegeben wird. Der Impuls wird ein Mal pro Umdrehung der primären Rückführung am positiven Offset-Wert erzeugt. Beachten Sie, dass die Einstellung der Offset-Auflösung auf 1 Umdrehung = 65536 basiert, was einer 16-Bit-Skala entspricht. Diese Einstellung ist fest und erfolgt unabhängig von der Auflösungseinstellung für die Kanäle A und B oben.
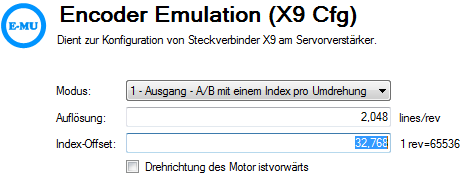
In diesem Fall beträgt der Index-Offset 180°, was einer halben Umdrehung der primären Rückführung entspricht.
Modus 2– A quad B mit absolutem Indeximpuls
Ausgangsmodus 2 - A quad B mit absolutem Indeximpuls – Anschlussbild
Bei Wahl von Modus 2 erscheint ein Feld zur Eingabe eines absoluten Indexpunktes (DRV.EMUEMTURN ). Der absolute Indeximpuls wird ausgegeben, wenn die Motorposition den vollständigen Offset erreicht. Die Summe aus absolutem Offset (die Umdrehungen) und Index-Offset (ein Bruchteil einer Umdrehung) ergibt den vollständigen Offset. Der Index-Offset ist festgelegt als 1 Umdrehung = 65536, was einer 16-Bit-Skala entspricht.
Der „vollständige Offset“ ist eine schreibgeschützte Berechnung, die das Verständnis für die Platzierung des Indeximpulses erleichtern soll.
Modus 6 – Ausgang – mit Indeximpuls pro Umdrehung und Eingang – Schritt und Richtung
In diesem Modus können Sie emulierte Puls/Richtung Encoder-Signale über Anschluss X9 (Emulierter Encoder) ausgeben und gleichzeitig ein Drehschalter-Schrittsignal über Anschluss X7 (Hochgeschwindigkeits-Optokoppler-EA) einlesen. Modus 6 und 7 sind identisch, mit dem einzigen Unterschied, dass der emulierte Encoder in Modus 6 einen inkrementalen Z-Impuls (ein Z-Impuls pro Umdrehung) und in Modus 7 einen absoluten Z-Impuls (ein Z-Impuls bei einer absoluten Position) erzeugt. DRV.EMUERES, DRV.EMUEZOFFSET und DRV.EMUETURN bestimmen die Lage des Nullimpulses für Modus 6 genauso wie für Modus 1.
Modus 7 – Ausgang – mit absolutem Index und Eingang – Schritt und Richtung
In diesem Modus können Sie emulierte Puls/Richtung Encoder-Signale über Anschluss X9 (Emulierter Encoder) ausgeben und gleichzeitig ein Drehschalter-Schrittsignal über Anschluss X7 (Hochgeschwindigkeits-Optokoppler-EA) einlesen. Modus 6 und 7 sind identisch, mit dem einzigen Unterschied, dass der emulierte Encoder in Modus 6 einen inkrementalen Z-Impuls (ein Z-Impuls pro Umdrehung) und in Modus 7 einen absoluten Z-Impuls (ein Z-Impuls bei einer absoluten Position) erzeugt. DRV.EMUERES, DRV.EMUEZOFFSET und DRV.EMUETURN bestimmen die Lage des Nullimpulses für Modus 7 genauso wie für Modus 2.
Modus 8 – Ausgang – mit Indeximpuls pro Umdrehung und Eingang – Rechts-/Links-Impuls
In diesem Modus können Sie emulierte CW/CCW Encoder-Signale über Anschluss X9 (Emulierter Encoder) ausgeben und gleichzeitig ein Handradsignal über Anschluss X7 (Hochgeschwindigkeits-Optokoppler-EA) einlesen. Modus 8 und 9 sind identisch, mit dem einzigen Unterschied, dass der emulierte Encoder in Modus 8 einen inkrementalen Z-Impuls (ein Z-Impuls pro Umdrehung) und in Modus 9 einen absoluten Z-Impuls (ein Z-Impuls bei einer absoluten Position) erzeugt. DRV.EMUERES, DRV.EMUEZOFFSET und DRV.EMUETURN bestimmen die Lage des Nullimpulses für Modus 8 genauso wie für Modus 1.
Modus 9 – Ausgang – mit absolutem Index und Eingang – Rechts/Links-Impuls
In diesem Modus können Sie emulierte CW/CCW Encoder-Signale über Anschluss X9 (Emulierter Encoder) ausgeben und gleichzeitig ein Handradsignal über Anschluss X7 (Hochgeschwindigkeits-Optokoppler-EA) einlesen. Modus 8 und 9 sind identisch, mit dem einzigen Unterschied, dass der emulierte Encoder in Modus 8 einen inkrementalen Z-Impuls (ein Z-Impuls pro Umdrehung) und in Modus 9 einen absoluten Z-Impuls (ein Z-Impuls bei einer absoluten Position) erzeugt. DRV.EMUERES, DRV.EMUEZOFFSET und DRV.EMUETURN bestimmen die Lage des Nullimpulses für Modus 9 genauso wie für Modus 2.
Eingangsmodi 3, 4 und 5 (veraltet)
Anschluss X9 kann für Eingangsmodi konfiguriert werden. Diese Eingangsmodi entsprechen den unten beschriebenen Signaltypen. Diese Bildschirmseite ermöglicht auch die Einstellung von Anschluss X9 auf Eingangsmodi. Da diese Modi veraltet sind, empfehlen wir DRV.EMUEMODE auf 0 zu setzen und mit FB2.MODE den Eingangsmodus für das zweite Feedback zu wählen.
Modus 3-A quad B Signale
Eingangsmodus 3 ermöglicht den Anschluss eines A quad B-Encoders oder des Encoder-Emulationsausgangs eines anderen Verstärkers und dessen Nutzung als Master-Encoder, doppelte Rückführung, Getriebe oder Notch-Eingang.
Modus 4-Impuls-/Richtungssignale
Eingangsmodus 4 ermöglicht den Anschluss des Servoverstärkers an die Schrittmotorsteuerung eines Drittanbieters. Die Schrittanzahl kann eingestellt werden, sodass der Verstärker an die Impuls-/Richtungssignale einer beliebigen Schrittmotorsteuerung angepasst werden kann.
Modus 5-CW/CCW-Signale
Der Verstärker kann an einen Controller eines Drittanbieters angeschlossen werden, der Up/Down-Signale liefert.
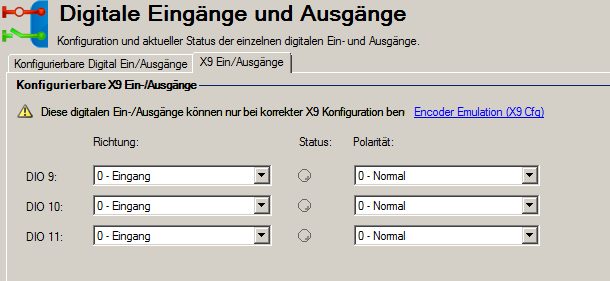
Modus 10, konfiguriert X9 für allgemeine E/A
Dieser Modus erlaubt die Verwendung der 3 Übertrager an X9 als allgemeine Eingänge oder Ausgänge (DIO 9, 10, 11). DIOx.DIR konfiguriert die Übertrager als Ein- oder Ausgänge. DIOx.INV steuert die Polarität dieser Signale.
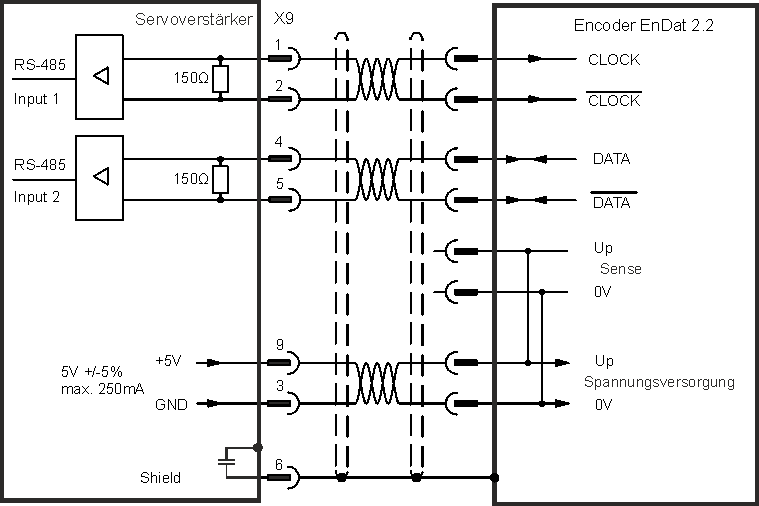
Modus 11, konfiguriert X9 für Endat 2.2
Dieser Modus ermöglicht den Anschluss eines Heidenhain Endat 2.2 Encoders an X9. Dieser Encoder kann als primäres Feedback oder als Drehschalter-Schrittsignal Eingang benutzt werden.
Ausgangs Modi 12, 13, und 14, emulierter Encoder mit durchgeschleiftem Z Signal.
Diese Modi sind ähnlich den Modi 1, 6 und 8. Es werden A/B Signale (Modus 12), Puls/Richtungs Signale (Modus 13) oder CW/CCW Pulse (Modus 14) erzeugt. Unterschied bei diesen Modi istz, dass der Z Impuls dem Pegel des Feedback 1 Index Impulses folgt. Der Z-Impuls befindet sich an einer festen Position relativ zum EEO Eingang, statt des EEO Ausgangs.
-
-
Wenn Sie absolute Multiturn- oder Singleturn-Feedbackgeräte und die Modi "Einmal pro Umdrehung" oder "Absoluter Z-Impuls" (DRV.EMUEMODES 1,2,6,7,8 oder 9) verwenden, wird der vom EEO erzeugte Z-Impuls immer auf die gleiche mechanische Position der primären Feedbackposition ausgerichtet. Wenn Sie einen Inkrementalgeber als Feedback und diese Modi verwenden, ist der Nullpunkt des primären Feedbacks beim Einschalten nicht immer an derselben mechanischen Position. Wenn Sie die Modi zum Durchschleifen des Nullimpulses (DRV.EMUEMODES 1,2,6,7,8 oder 9)verwenden, ist der vom EEO erzeugte Z-Impuls stets an derselben mechanischen Position der primären Rückführungsposition ausgerichtet.
-
- Wenn als primäres Feedback ein Resolver mit mehr als 2 Polen (Multispeed) verwendet wird, erzeugt AKD EEO trotzdem nur einen Nullimpuls pro mechanischer Umdrehung des Motors. Der Nullimpuls hängt ab von der Startposition des Motors!
Ausgangsmodi 15, 16 und 17, Schrittmotorsteuerung über Feldbus
Diese Modi sind ähnlich den Modi 1, 6 und 8. Es werden A/B Signale (Modus 15), Puls/Richtungs Signale (Modus 16) oder CW/CCW Pulse (Modus 17) erzeugt. Bei diesen Modi werden keine Z Impulse generiert. Die Ausgabe wird aus einer geräteinternen Quelle, die Daten vom EtherCAT oder CANopen Netzwerk interpoliert.
Beispiele: Schrittmotor-Steuerung und EEOs über Feldbus
Auflösung
Die Auflösungseinstellung definiert, wie viele Schritte pro Umdrehung der primären Rückführung ausgegeben werden (wenn Anschluss X9 als Ausgang konfiguriert ist) bzw. wie viele Schritte als vollständige Umdrehung des Eingangssignals von einer externen Steuerung gelten (wenn Anschluss X9 als Eingang konfiguriert ist). Bei der Auflösung handelt es sich um eine Post-Quadratur.Beispiel: Ein 1.000-Schritt-Encoder hat eine Auflösung von 4.000 Schritten.
Hinweis: Wenn der Wert für die Auflösung auf gesetzt ist, erzeugt Anschluss X9 keinen Befehl.
Zugehörige Parameter und Befehle
Der Parameter DRV.EMUEMODE legt die EEO Ausgangs- und Eingangsmodi fest. Die Auflösung (vor der Multiplikation) wird über die Funktion DRV.EMUERES eingestellt. Verwenden Sie den Parameter DRV.EMUEZOFFSET zur Einstellung und Speicherung der Nullimpuls-Position innerhalb einer mechanischen Umdrehung. DRV.EMUEMTURN dient zur Einstellung des absoluten Indexpunktes im Modus 2 und DRV.HANDWHEEL zur Einstellung der Position, an der der Indeximpuls im Ausgangsmodus 2 ausgegeben wird.







